H2-optimal control
We are now going to do the same as we did it while discussing the LQR control for a system with stochastic disturbances. We have seen that the optimal control problem of minimizing the expected value of an integral quadratic cost can be reformulated as a problem of minimizing the \mathcal{H}_2 system norm of a certain interconnection of the system and the controller. This is illustrated in Fig. 1.
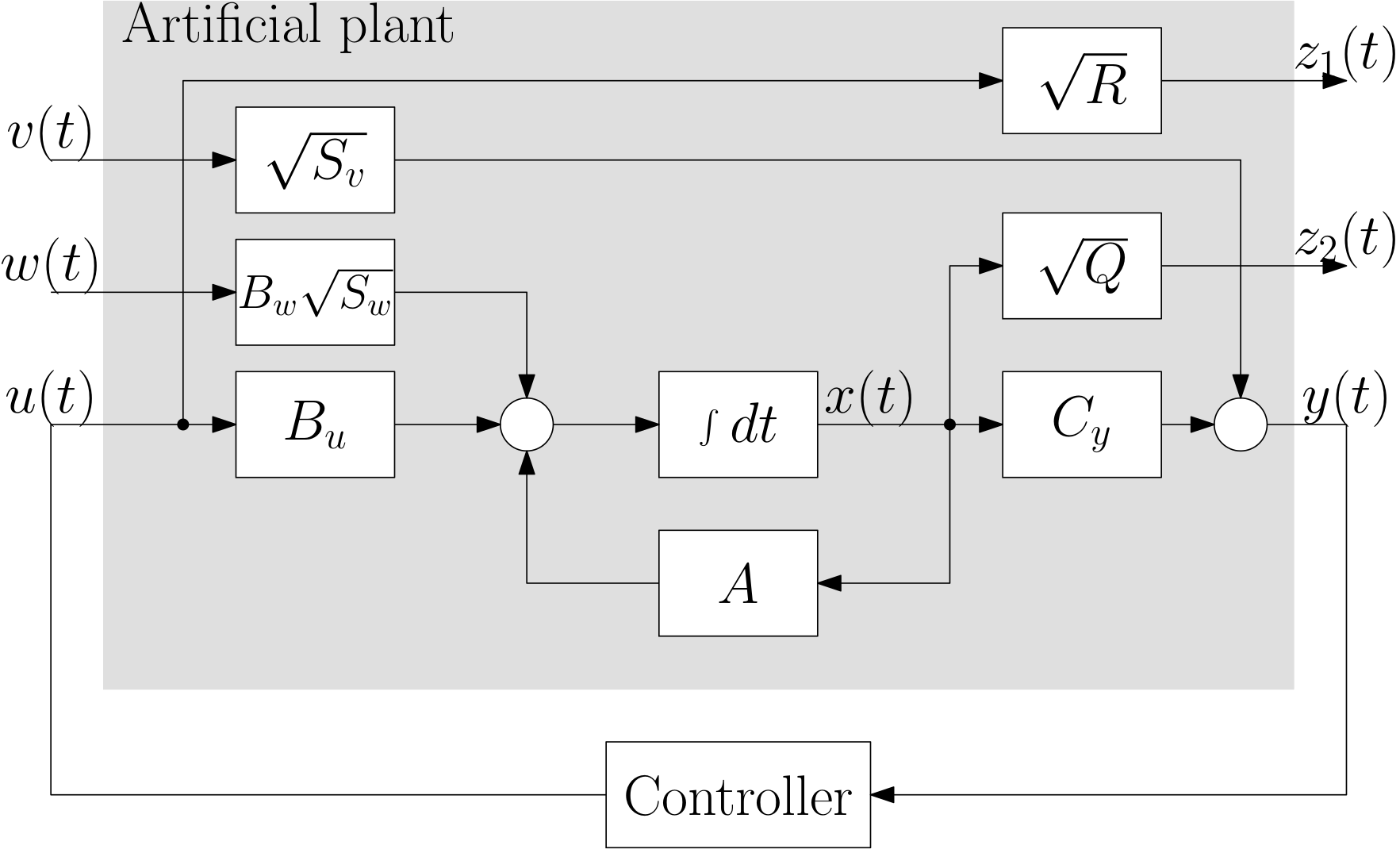
The generalized plant (the gray block in the figure) has
- two types of inputs:
- exogenous input, here composed of the random disturbance w(t) and the measurement noise v(t), both modelled as white noise,
- control input u(t),
- two types of outputs:
- regulated outputs to be regulated (close) to zero, here the two variables z_1(t) and z_2(t),
- measured outputs y(t).
Having seen another instance of this reformulation, we now formulate the \mathcal{H}_2-optimal control problem in full generality. For the feedback interconnection of a generalized plant \mathbf P and a controller \bm K as in Fig. 2, we want to find the controller that minimizes the \mathcal{H}_2 norm of the closed-loop transfer function from the exogenous inputs \bm w to the regulated outputs \bm z.
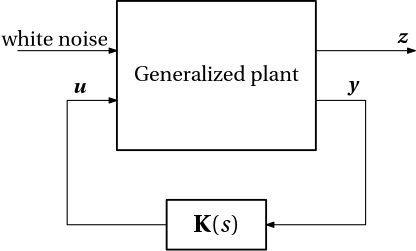
Denoting the closed-loop transfer function as \mathbf N(\mathbf P, \bm K), the optimal control problem is then given by \boxed{ \operatorname*{minimize}_{\bm K(s)\text{ stabilizing}}\|\mathbf N(\mathbf P, \bm K)\|_{2} }
To conclude, while our main approach towards optimal control design so far has been to minimize the integral of some functions of the states and the control inputs, we have just seen that such problem can be reformulated as the minimization of the \mathcal H_2 norm of a feedback interconnection of a special artificial/auxiliary/generalized system and the feedback controller.
While this reformulation by itself may open some new perspectives on the problem, it also opens the door to a whole new family of optimal control problems that are defined by using other system norms instead of the \mathcal H_2 norm. We will see some of these problems in the next lectures.
Back to top