Here we introduce a major alternative framework to hybrid automata for modelling hybrid systems. It is called hybrid equations, sometimes also hybrid state equations to emphasize that what we are after is some kind of analogy with state equations \dot{x}(t) = f(x(t), u(t)) and x_{k+1} = g(x_k, u_k) that we are familiar with from (continuous-valued) dynamical systems. Sometimes it is also called event-flow equations or jump-flow equations.
These are the key ideas:
The (state) variables can change values discontinuously upon occurence of events – they jump.
Between the jumps they evolve continuously – they flow.
Some variables may only flow, they never jump.
The variables staying constant between the jumps can be viewed as flowing too.
The major advantage of this modeling framework is that we do not have to distinguish between the two types of state variables. This is in contrast with hybrid automata, where we have to start by classifying the state variables as either continuous or discrete before moving on. In the current framework we treat all the variables identically – they mostly flow and occasionally (perhaps never, which is OK) jump.
Hybrid equations
It is high time to introduce hybrid (state) equations – here they come
\begin{aligned}
\dot{x} &= f(x), \quad x \in \mathcal{C},\\
x^+ &= g(x), \quad x \in \mathcal{D},
\end{aligned}
where
f: \mathcal{C} \rightarrow \mathbb R^n is the flow map,
\mathcal{C}\subset \mathbb R^n is the flow set,
g: \mathcal{D} \rightarrow \mathbb R^n is the jump map,
\mathcal{D}\subset \mathbb R^n is the jump set.
This model of a hybrid system is thus parameterized by the quadruple \{f, \mathcal C, g, \mathcal D\}.
Hybrid inclusions
We now extend the presented framework of hybrid equations a bit. Namely, the functions on the right-hand sides in both the differential and the difference equations are no longer assigning just a single value (as well-behaved functions do), but they assign sets!
\begin{aligned}
\dot{x} &\in \mathcal F(x), \quad x \in \mathcal{C},\\
x^+ &\in \mathcal G(x), \quad x \in \mathcal{D}.
\end{aligned}
where
\mathcal{F} is the set-valued flow map,
\mathcal{C} is the flow set,
\mathcal{G} is the set-valued jump map,
\mathcal{D} is the jump set.
Output equations
Typically a full model is only formed upon defining some output variables (oftentimes just a subset of possibly scaled state variables or their linear combinations). These output variables then obey some output equation
y(t) = h(x(t)),
or
y(t) = h(x(t),u(t)).
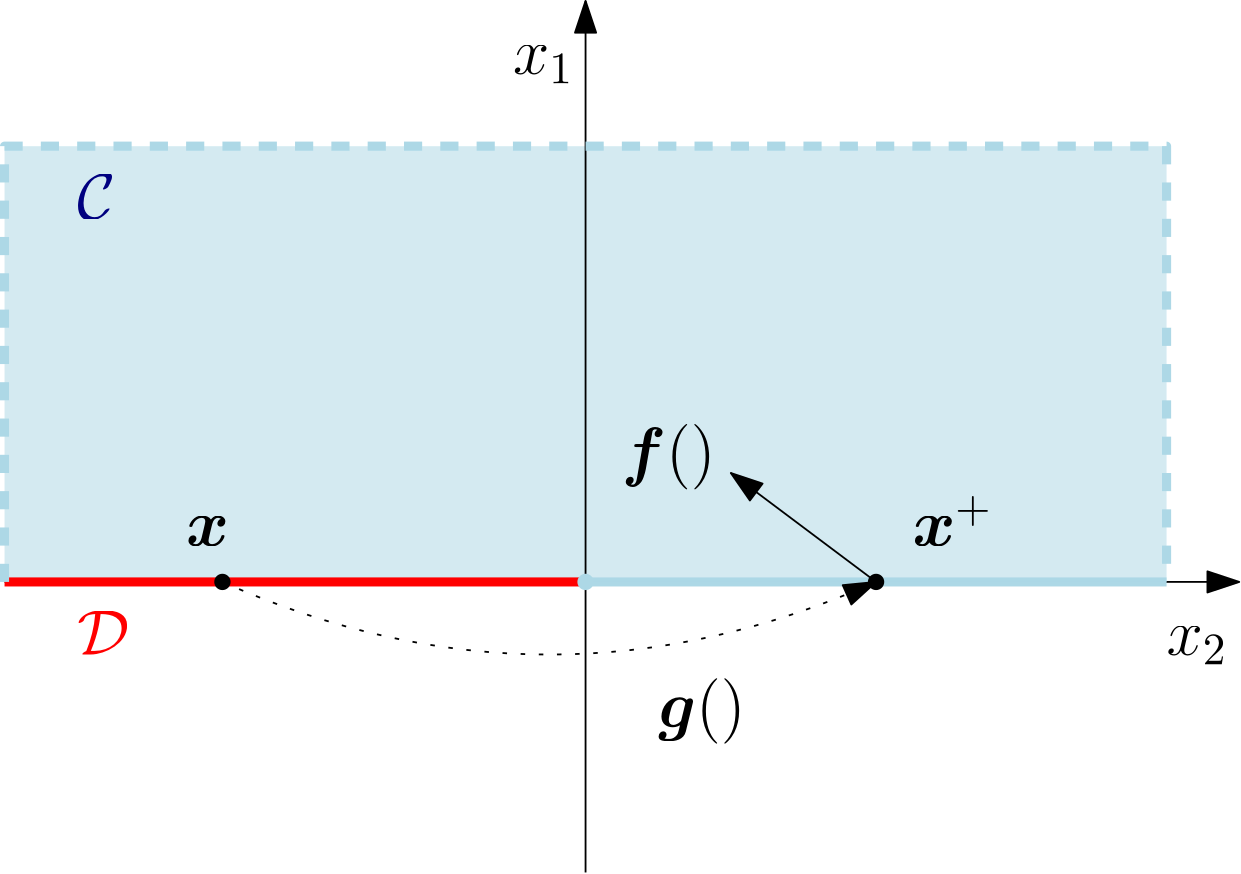
Example 1 (Bouncing ball) This is the “hello world example” for hybrid systems with state jumps (pun intended). The state variables are the height and the vertical speed of the ball.
\bm x \in \mathbb{R}^2, \qquad \bm x = \begin{bmatrix}x_1 \\ x_2\end{bmatrix}.
The quadruple defining the hybrid equations is
\mathcal{C} = \{\bm x \in \mathbb{R}^2 \mid x_1>0 \lor (x_1 = 0, x_2\geq 0)\},
f(\bm x) = \begin{bmatrix}x_2 \\ -g\end{bmatrix}, \qquad g = 9.81,
\mathcal{D} = \{\bm x \in \mathbb{R}^2 \mid x_1 = 0, x_2 < 0\},
g(\bm x) = \begin{bmatrix}x_1 \\ -\alpha x_2\end{bmatrix}, \qquad \alpha = 0.8.
The two sets and two maps are illustrated below.
Figure 1: Maps and sets for the bouncing ball example
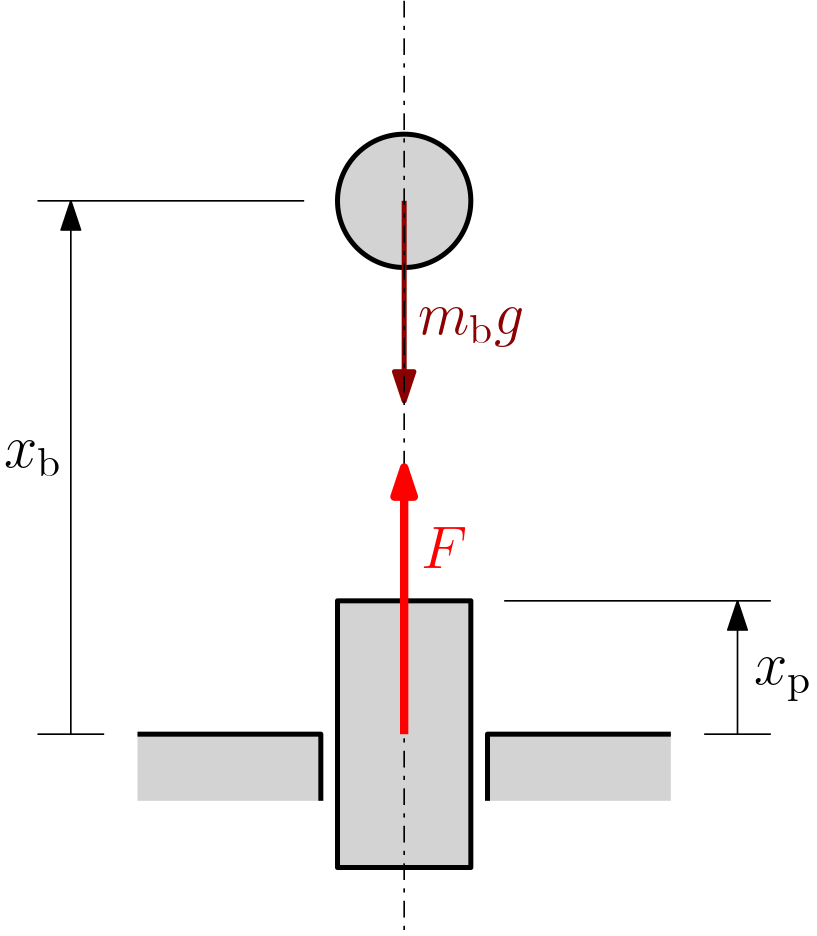
Example 2 (Bouncing ball on a controlled piston) We now extend the simple bouncing ball example by adding a vertically moving piston. The piston is controlled by a force.
Example of a ball bouncing on a vertically moving piston
In our analysis we neglect the sizes (for simplicity).
The collision happens when x_\mathrm{b} = x_\mathrm{p}, and v_\mathrm{b} < v_\mathrm{p}.
The conservation of momentum after a collision reads
m_\mathrm{b}v_\mathrm{b}^+ + m_\mathrm{p}v_\mathrm{p}^+ = m_\mathrm{b}v_\mathrm{b} + m_\mathrm{p}v_\mathrm{p}.
\tag{1}
The collision is modelled using a restitution coefficient
v_\mathrm{p}^+ - v_\mathrm{b}^+ = -\gamma (v_\mathrm{p} - v_\mathrm{b}).
\tag{2}
From the momentum conservation Eq. 1
v_\mathrm{p}^+ = \frac{m_\mathrm{b}}{m_\mathrm{p}}v_\mathrm{b} + v_\mathrm{p} - \frac{m_\mathrm{b}}{m_\mathrm{p}}v_\mathrm{b}^+
we substitute to Eq. 2 to get
\frac{m_\mathrm{b}}{m_\mathrm{p}}v_\mathrm{b} + v_\mathrm{p} - \frac{m_\mathrm{b}}{m_\mathrm{p}}v_\mathrm{b}^+ - v_\mathrm{b}^+ = -\gamma (v_\mathrm{p} - v_\mathrm{b}),
from which we express v_\mathbb{b}^+
\begin{aligned}
v_\mathrm{b}^+ &= \frac{1}{1+\frac{m_\mathrm{b}}{m_\mathrm{p}}}\left(\frac{m_\mathrm{b}}{m_\mathrm{p}}v_\mathrm{b} + v_\mathrm{p} + \gamma (v_\mathrm{p} - v_\mathrm{b})\right)\\
&= \frac{m_\mathrm{p}}{m_\mathrm{p}+m_\mathrm{b}}\left(\frac{m_\mathrm{b}-\gamma m_\mathrm{p}}{m_\mathrm{p}}v_\mathrm{b} + (1+\gamma)v_\mathrm{p}\right)\\
&= \frac{m_\mathrm{b}-\gamma m_\mathrm{p}}{m_\mathrm{b}+m_\mathrm{p}}v_\mathrm{b} + \frac{(1+\gamma)m_\mathrm{p}}{m_\mathrm{p}+m_\mathrm{b}}v_\mathrm{p}
\end{aligned}.
Substitute to the expression for v_\mathbb{p}^+ to get
\begin{aligned}
v_\mathrm{p}^+ &= \frac{m_\mathrm{b}}{m_\mathrm{p}}v_\mathrm{b} + v_\mathrm{p} - \frac{m_\mathrm{b}}{m_\mathrm{p}}\left(\frac{m_\mathrm{b}-\gamma m_\mathrm{p}}{m_\mathrm{b}+m_\mathrm{p}}v_\mathrm{b} + \frac{(1+\gamma)m_\mathrm{p}}{m_\mathrm{p}+m_\mathrm{b}}v_\mathrm{p}\right)\\
&= \frac{m_\mathrm{b}}{m_\mathrm{p}}\left(1-\frac{m_\mathrm{b}-\gamma m_\mathrm{p}}{m_\mathrm{b}+m_\mathrm{p}}\right) v_\mathrm{b} \\
&\qquad\qquad + \left(1-\frac{m_\mathrm{b}}{m_\mathrm{p}}\frac{(1+\gamma)m_\mathrm{p}}{m_\mathrm{p}+m_\mathrm{b}}\right) v_\mathrm{p}\\
&= \frac{m_\mathrm{b}}{m_\mathrm{b}+m_\mathrm{p}}(1+\gamma) v_\mathrm{b} + \frac{m_\mathrm{p}-\gamma m_\mathrm{b}}{m_\mathrm{p}+m_\mathrm{b}} v_\mathrm{p}.
\end{aligned}
Finally we can simplify the expressions a bit by introducing m=\frac{m_\mathrm{b}}{m_\mathrm{b}+m_\mathrm{p}}. The jump equation is then
\begin{bmatrix}
v_\mathrm{b}^+\\
v_\mathrm{p}^+
\end{bmatrix}
=
\begin{bmatrix}
m - \gamma (1-m) & (1+\gamma)(1-m)\\
m(1+\gamma) & 1-m-\gamma m
\end{bmatrix}
\begin{bmatrix}
v_\mathrm{b}\\
v_\mathrm{p}
\end{bmatrix}.
Example 3 (Synchronization of fireflies) This is a famous example in synchronization. We consider n fireflies, x_i is the i-th firefly’s clock, normalized to [0,1]. The clock resets (to zero) when it reaches 1. Each firefly can see the flashing of all other fireflies. As soon as it observes a flash, it increases its clock by \varepsilon \%.
Here is how we model the problem using the four-tuple \{f, \mathcal C, g, \mathcal D\}:
\mathcal{C} = [0,1)^n = \{\bm x \in \mathbb R^n\mid x_i \in [0,1),\; i=1,\ldots,n \},
\bm f = [f_1, f_2, \ldots, f_n]^\top,\quad f_i = 1, \quad i=1,\ldots,n,
\mathcal{D} = \{\bm x \in [0,1]^n \mid \max_i x_i = 1 \},
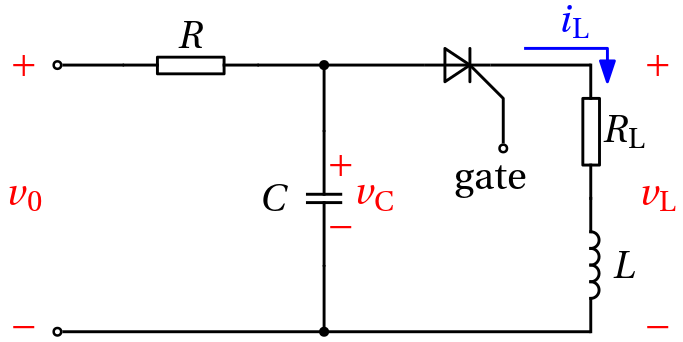
The flow set is
\begin{aligned}
\mathcal{C} &= \{\bm x \mid q=0,\, \tau<\frac{\alpha}{\omega},\, i_\mathrm{L}=0\}\\ &\qquad \cup \{\bm x \mid q=1,\, i_\mathrm{L}>0\}
\end{aligned}.
The jump set is
\begin{aligned}
\mathcal{D} &= \{\bm x \mid q=0,\, \tau\geq \frac{\alpha}{\omega},\, i_\mathrm{L}=0,\, v_\mathrm{C}>0\}\\ &\qquad \cup \{\bm x \mid q=1,\, i_\mathrm{L}=0,\, v_\mathrm{C}<0\}
\end{aligned}.
The last condition in the jump set comes from the requirement that not only must the current through the inductor be zero, but also it must be decreasing. And from the state equation it follows that the voltage on the capacitor must be negative.
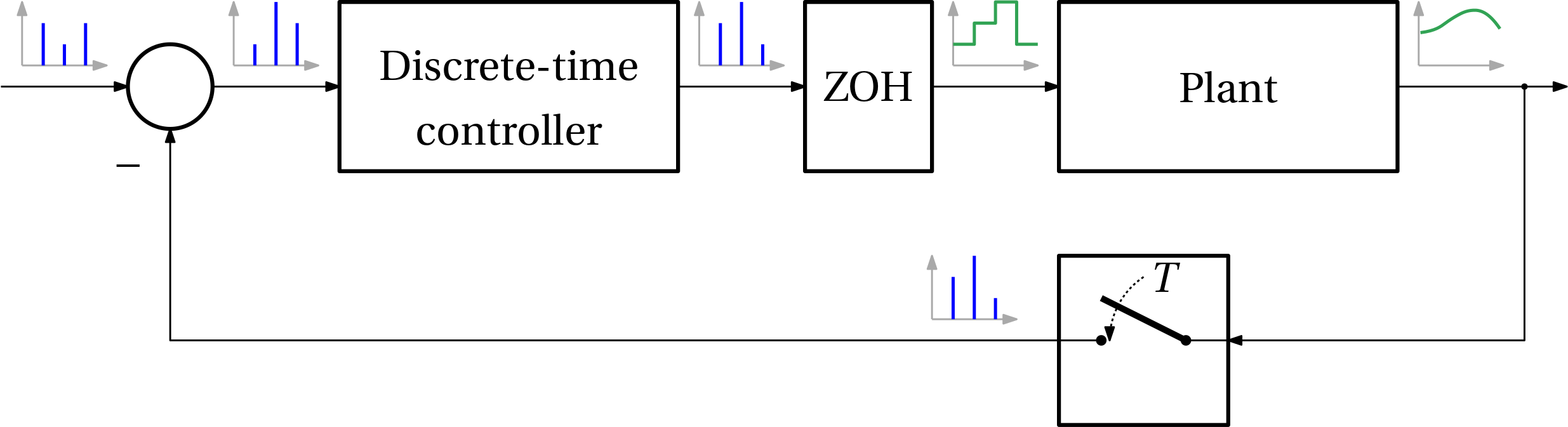
Example 5 (Sampled-data feedback control) Another example of a dynamical system that fits nicely into the hybrid equations framework is sampled-data feedback control system. Within the feedback loop in Fig. 3, we recognize a continuous-time plant and a discrete-time controller.
Figure 3: Sampled data feedback control
The plant is modelled by \dot x_\mathrm{p} = f_\mathrm{p}(x_\mathrm{p},u), \; y = h(x_\mathrm{p}). The controller samples the output T-periodically and computes its own output as a nonlinear function u = \kappa(r-y).
The closed-loop model is then
\dot x_\mathrm{p} = f_\mathrm{p}(x_\mathrm{p},\kappa(r-h(x_\mathrm{p}))), \; y = h(x_\mathrm{p}).
The closed-loop state vector is
\bm x =
\begin{bmatrix}
x_\mathrm{p}\\ u \\ \tau
\end{bmatrix}
\in
\mathbb R^n \times \mathbb R^m \times \mathbb R.
The flow set is
\begin{aligned}
\mathcal{C} &= \{\bm x \mid \tau \in [0,T)\}
\end{aligned}
The flow map is
\bm f(\bm x)
=
\begin{bmatrix}
f_\mathrm{p}(x_\mathrm{p},u)\\
0\\
1
\end{bmatrix}
The jump set is
\begin{aligned}
\mathcal{D} &= \{\bm x \mid \tau = T\}
\end{aligned}
or rather
\begin{aligned}
\mathcal{D} &= \{\bm x \mid \tau \geq T\}
\end{aligned}
The jump map is
\bm g(\bm x) =
\begin{bmatrix}
x_\mathrm{p}\\
\kappa(r-y)\\
0
\end{bmatrix}
You may wonder why we bother with modelling this system as a hybrid system at all. When it comes to analysis of the closed-loop system, implementation of the model in Simulink allows for seemless mixing of continuous-time and dicrete-time blocks. And when it comes to control design, we can either discretize the plant and design a discrete-time controller, or design a continuous-time controller and then discretize it. No need for new theoris. True, but still, it is nice to have a rigorous framework for analysis of such systems. The more so that the sampling time T may not be constant – it can either vary randomly or perhaps the samling can be event-triggered. All these scenarios are easily handled within the hybrid equations framework.
Hybridness after closing the loop
We have defined hybrid systems, but what exactly is hybrid when we close a feedback loop? There are three possibilities:
Hybrid plant + continuous controller.
Hybrid plant + hybrid controller.
Continuous plant + hybrid controller.
The first case is encountered when we use a standard controller such as a PID controller to control a system whose dynamics can be characterized/modelled as hybrid. The second scenario considers a controller that mimicks the behavior of a hybrid system. The third case is perhaps the least intuitive: although the plant to be controller is continuous(-valued), it may still make sense to design and implement a hybrid controller, see the next paragraph.
Impossibility to stabilize without a hybrid controller
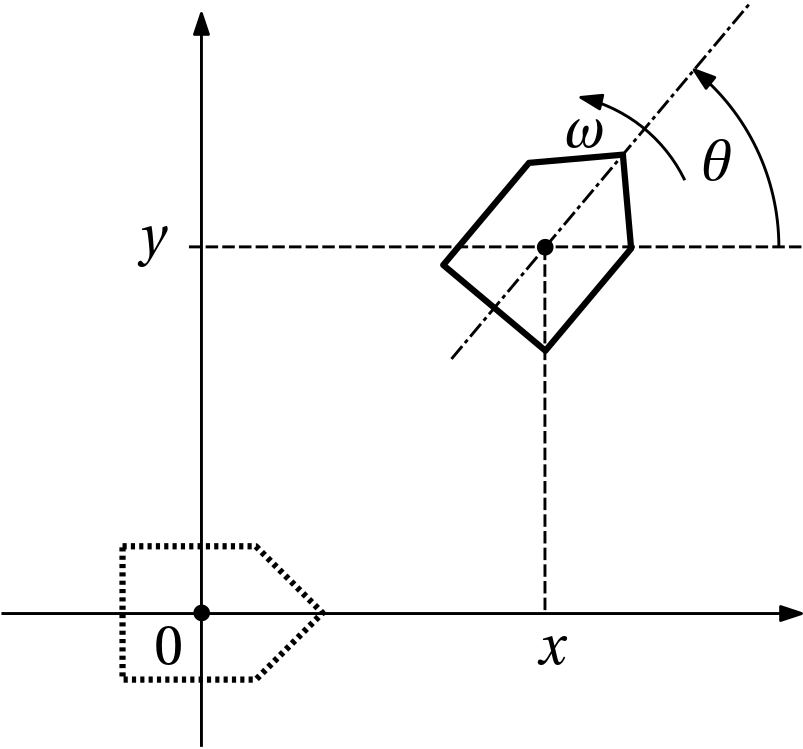
Example 6 (Unicycle stabilization) We consider a unicycle model of a vehicle in a plane, characterized by the position and orientation, with the controlled forward speed v and the yaw (turning) angular rate \omega.
Figure 4: Unicycle vehicle
The vehicle is modelled by
\begin{aligned}
\dot x &= v \cos \theta,\\
\dot y &= v \sin \theta,\\
\dot \theta &= \omega,
\end{aligned}
\bm x = \begin{bmatrix}
x\\ y\\ \theta
\end{bmatrix},
\quad
\bm u = \begin{bmatrix}
v\\ \omega
\end{bmatrix}.
It is known that this system cannot be stabilized by a continuous feedback controller. The general result that applies here was published in [1]. The condition of stabilizability by a time-invariant continuous state feedback is that the image of every neighborhood of the origin under (\bm x,\bm u) \mapsto \bm f(\bm x, \bm u) contains some neighborhood of the origin. This is not the case here. The map from the state-control space to the velocity space is
\begin{bmatrix}
x\\ y\\ \theta\\ v\\ \omega
\end{bmatrix}
\mapsto
\begin{bmatrix}
v \cos \theta\\
v \sin \theta \\
\omega
\end{bmatrix}.
Now consider a neighborhood of the origin such that |\theta|<\frac{\pi}{2}. It is impossible to get \bm f(\bm x, \bm u) = \begin{bmatrix}
0\\ f_2 \\ 0\end{bmatrix}, \; f_2\neq 0. Hence, stabilization by a continuous feedback \bm u = \kappa (\bm x) is impossible.
But it is possible to stabilize the vehicle using a discontinuous feedback. And discontinuous feedback controller can be viewed as switching control, which in turn can be seen as instance of a hybrid controller.
Example 7 (Global asymptotic stabilization on a circle) We now give a demonstration of a general phenomenon of stabilization on a manifold. We will see that even if asymptotic stabilization by a continuous feedback is possible, it may not be possible to guarantee it globally.
Why control on manifolds?
First, recall that a manifold is a solution set for a system of nonlinear equations. A prominent example is a unit circle \mathbb S_1 = \{\bm x \in \mathbb R^2 \mid x_1^2 + x_2^2 - 1 = 0\}. An extension to two variables is then \mathbb S_2 = \{\bm x \in \mathbb R^4 \mid x_1^2 + x_2^2 - 1 = 0, \, x_3^2 + x_4^2 - 1 = 0\}. Now, why shall we bother to study control within this type of a state space? It turns out that such models of state space are most appropriate in mechatronic/robotic systems wherein angular variables range more than 360^\circ. We worked on this kind of a system some time ago when designing a control system for inertially stabilized gimballed camera platforms.
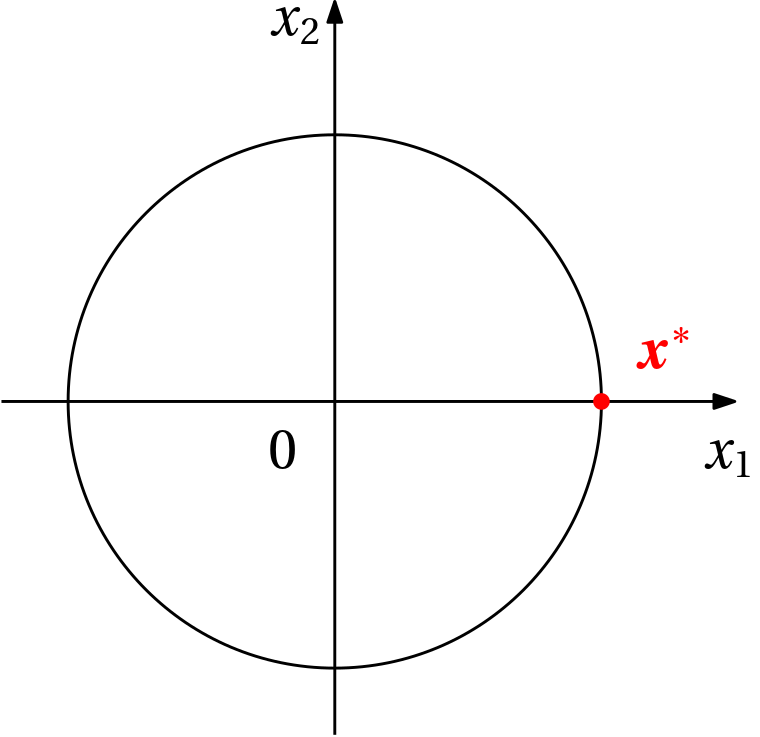
In this example we restrict the motion of of a particle to sliding around a unit circle \mathbb S_1 is modelled by
\dot{\bm x} = u\begin{bmatrix}0 & -1\\ 1 & 0\end{bmatrix}\bm x,
where \bm x \in \mathbb S^1,\quad u\in \mathbb R.
The point to be stabilized is \bm x^* = \begin{bmatrix}1\\ 0\end{bmatrix}.
Figure 5: Asymptotic stabilization on a circle
What is required from a globally asymptotically stabilizing controller?
Solutions stay in \mathbb S^1,
Solutions converge to \bm x^*,
If a solution starts near \bm x^*, it stays near.
One candidate is \kappa(\bm x) = -x_2.
Define the (Lyapunov) function V(\bm x) = 1-x_1.
Indeed, it does qualify as a Lyapunov function because it is zero at \bm x^* and positive elsewhere. Furthermore, its time derivative along the solution trajectory is
\begin{aligned}
\dot V &= \left(\nabla_{\bm{x}}V\right)^\top \dot{\bm x}\\
&= \begin{bmatrix}-1 & 0\end{bmatrix}\left(-x_2\begin{bmatrix}0 & -1\\ 1 & 0\end{bmatrix}\begin{bmatrix} x_1 \\ x_2 \end{bmatrix}\right)\\
&= -x_2^2\\
&= -(1-x_1^2),
\end{aligned}
from which it follows that
\dot V < 0 \quad \forall \bm x \in \mathbb S^1 \setminus \{-1,1\}.
With u=-x_2 the point \bm x^* is stable but not globally atractive, hence it is not globally asymptotically stable.
Can we do better?
Yes, we can. But we need to incorporate some switching into the controller. Loosely speaking anywhere except for the state (-1,0), we can apply the previously designed controller, and at the troublesome state (-1,0), or actually in some region around it, we need to switch to another controller that would drive the system away from the problematic region.
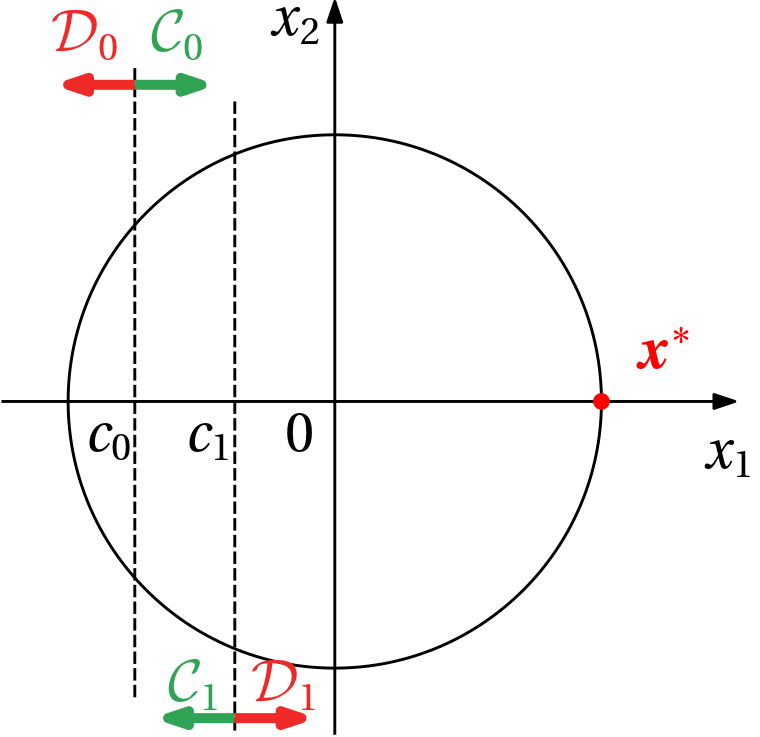
But we will take this example as an opportunity to go one step further and instead of just a switching controller we design a hybrid controller. The difference is that within a hybrid controller we can incorporate some hysteresis, which is a robustifying feature. In order to do that, we need to introduce a new state variable q\in\{0,1\}. Determination of the flow and jump sets is sketched in Fig. 6.
Figure 6: Definition of the sets defining a hybrid controller
Note that there is no hysteresis if c_0=c_1, in which case the hybrid controller reduces to a switching controller (but more on switching controllers in the next chapter).
The two feedback controllers are given by
\begin{aligned}
\kappa(\bm x,0) &= \kappa_0(\bm x) = -x_2,\\
\kappa(\bm x,1) &= \kappa_1(\bm x) = -x_1.
\end{aligned}
The flow map is (DIY)
f(\bm x, q) = \ldots
The flow set is
\mathcal{C} = (\mathcal C_0 \times \{0\}) \cup (\mathcal C_1 \times \{1\}).
The jump set is
\mathcal{D} = (\mathcal D_0 \times \{0\}) \cup (\mathcal D_1 \times \{1\}).
The jump map is
g(\bm x, q) = 1-q \quad \forall [\bm x, q]^\top \in \mathcal D.
Simulation using Julia is provided below.
Show the code
usingOrdinaryDiffEq# Defining the sets and functions for the hybrid equationsc₀, c₁ =-2/3, -1/3C(x,q) = (x[1] >= c₀ && q ==0) || (x[1] <= c₁ && q ==1) # Actually not really needed, just a complement of D.D(x,q) = (x[1] < c₀ && q ==0) || (x[1] > c₁ && q ==1) g(x,q) =1-qκ(x,q) = q==0 ? -x[2] :-x[1] functionf!(dx,x,q,t) # Already in the format for the ODE solver. A = [0.0-1.0; 1.00.0] dx .=A*x*κ(x,q)end# Defining the initial conditions for the simulationcᵢ = (c₀+c₁)/2x₀ = [cᵢ,sqrt(1-cᵢ^2)]q₀ =1# Setting up the simulation problemtspan = (0.0,10.0)prob =ODEProblem(f!,x₀,tspan,q₀)functioncondition(x,t,integrator) q = integrator.p returnD(x,q)endfunctionaffect!(integrator) q = integrator.p x = integrator.u integrator.p =g(x,q)endcb =DiscreteCallback(condition,affect!)# Solving the simulation problemsol =solve(prob,Tsit5(),callback=cb,dtmax=0.1) # ContinuousCallback more suitable here# Plotting the results of the simulationusingPlotsgr(tickfontsize=12,legend_font_pointsize=12,guidefontsize=12)plot(sol,label=["x₁""x₂"],xaxis="t",yaxis="x",lw=2)hline!([c₀], label="c₀")hline!([c₁], label="c₁")
Figure 7: Simulation of stabilization on a circle using a hybrid controller
The solution can also be visualized in the state space.
Figure 8: Simulation of stabilization on a circle using a hybrid controller
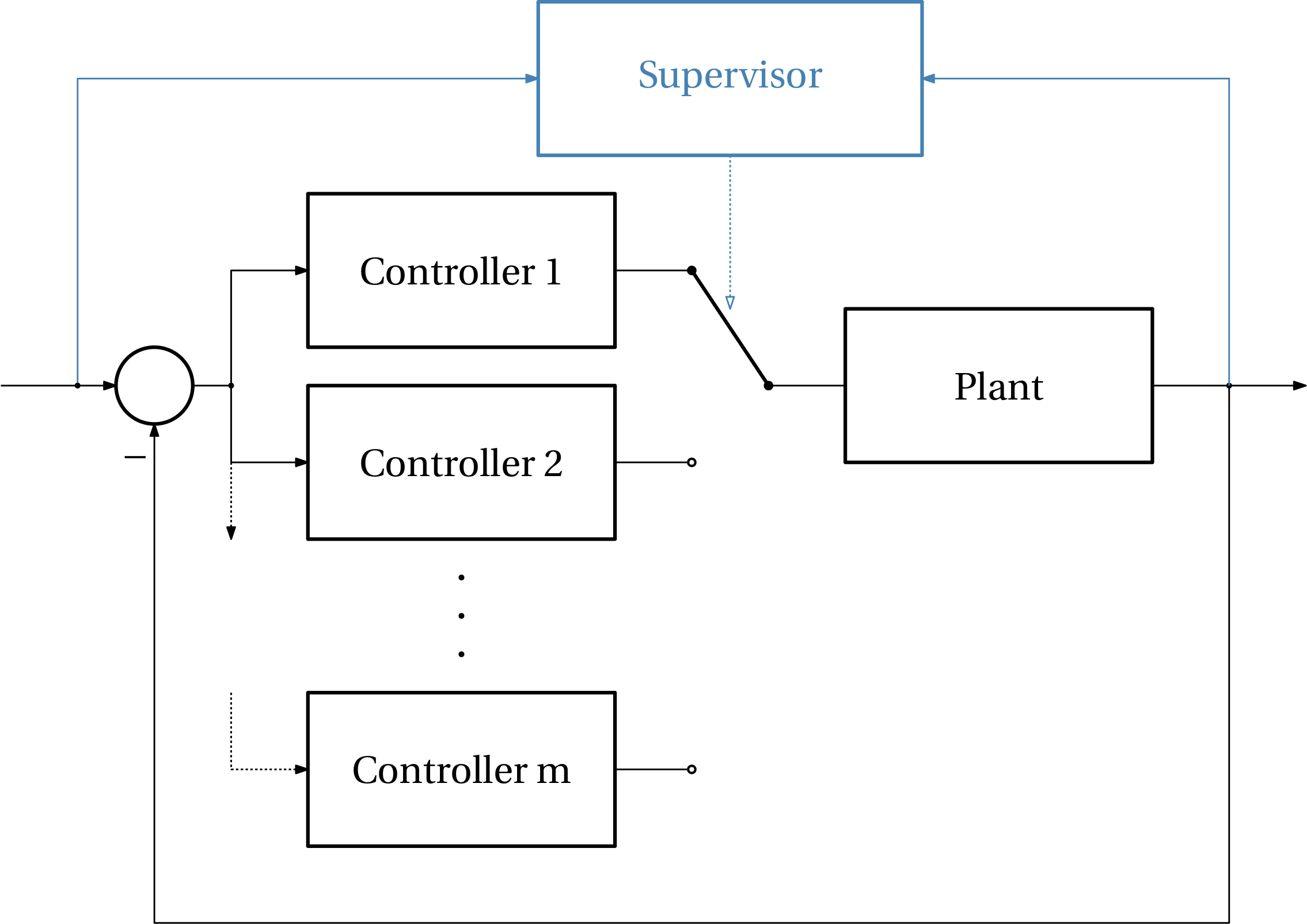
Supervisory control
Yet another problem that can benefit from being formulated as a hybrid system is supervisory control.
Figure 9: Supervisory control
Combining local and global controllers \subset supervisory control
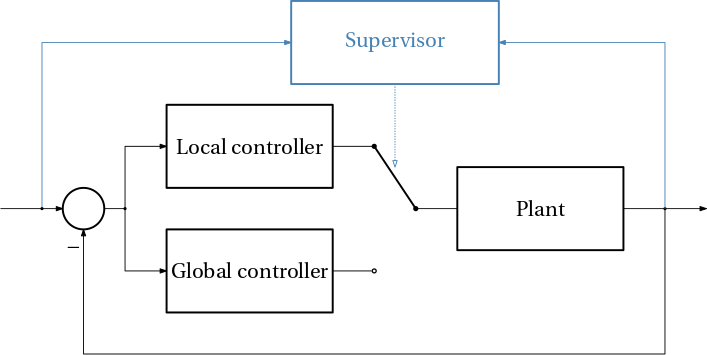
As a subset of supervisory control we can view a controller that switches between a global and a local controller.
Figure 10: Combining global and local controllers
Local controllers have good transient response but only work well in a small region around the equilibrium state. Global controllers have poor transient response but work well in a larger region around the equilibrium state.
A useful example is that of swinging up and stabilization of a pendulum: the local controller can be designer for a linear model obtained by linearization about the upright orientation of the pendulum. But such controller can only be expected to perform well in some small region around the upright orientation. The global controller is designed to bring the pendulum into that small region.
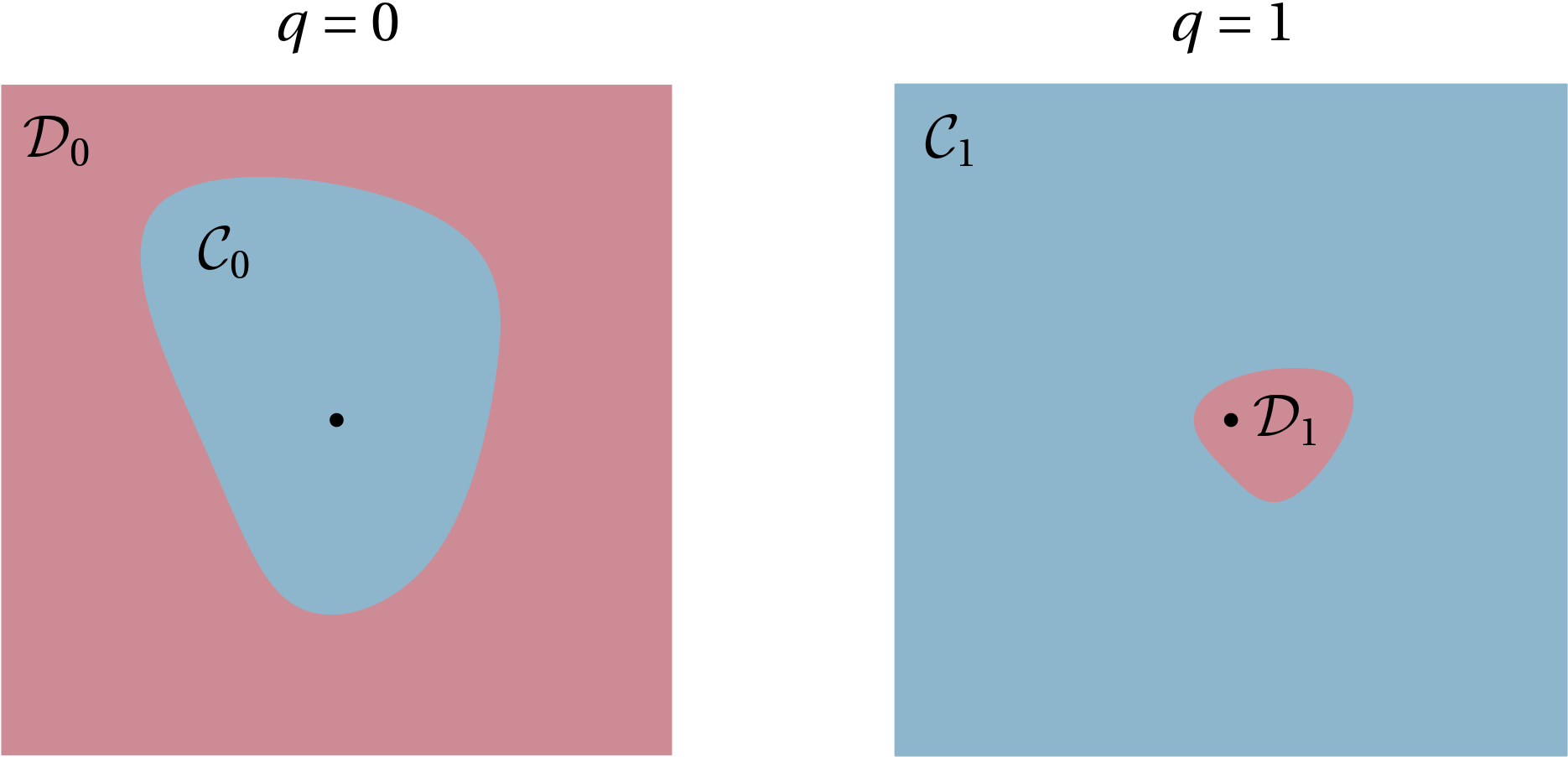
The flow and jump sets for the local and global controllers are in Fig. 11. Can you tell, which is which? Remember that by introducing the discrete variable q, some hysteresis is in the game here.
Figure 11: Flow and jump sets for a local and a global controller
R. Brockett, “Asymptotic stability and feedback stabilization,” in Differential Geometric Control Theory, R. Brockett, R. Millman, and H. Sussmann, Eds., Boston: Birkhäuser, 1983.